Pono Servo DC Motor 46S/12V-8A1

ʻO nā hiʻohiʻona kumu o ka servo DC motor: (nā hiʻohiʻona ʻē aʻe, hiki ke hana maʻamau)
| 1. Hoʻohālikelike ʻia ka uila: | DC 12V | 5. Ua helu ʻia ka wikiwiki: | ≥ 2600 rpm |
| 2. ʻO ka pae uila uila: | DC 7.4V-13V | 6. Ke ālai nei i kēia manawa: | ≤2.5A |
| 3. Ka mana helu: | 25W | 7. Hoʻouka i kēia manawa: | ≥1A |
| 4. Rotation kuhikuhi: | Aia ma luna ka pahu puka CW | 8. Hoʻokuʻu ʻia ka lāʻau: | ≤1.0mm |
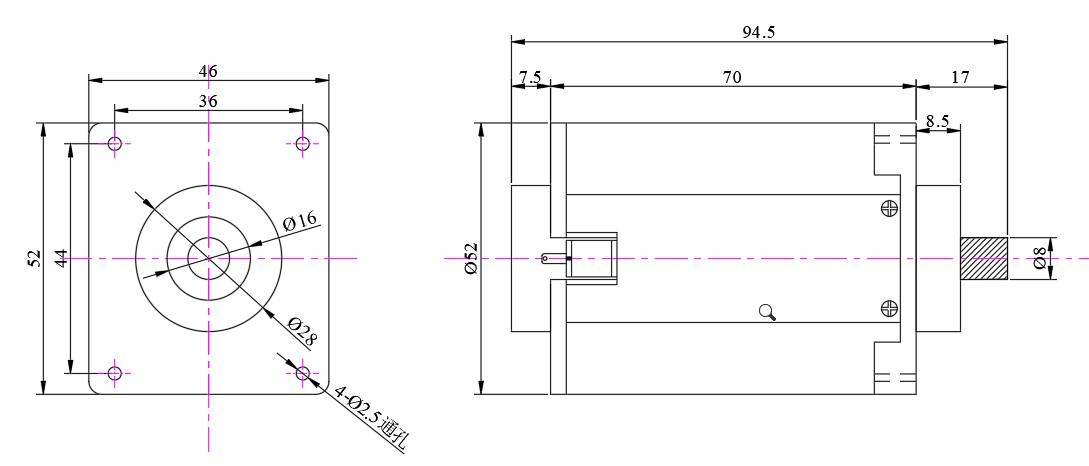
Kiʻikuhi hiʻohiʻona huahana
Pau-manawa
Mai ka lā o ka hana ʻana, ʻo ka manawa hoʻohana palekana o ka huahana he 10 mau makahiki, a ʻo ka manawa hana mau ʻo ≥ 2000 mau hola.
Nā hiʻohiʻona huahana
1.Compact, hoʻolālā hoʻopakele wahi;
2. ʻO ka hana pōʻalo;
3.Long lawelawe ola o ka pulupulu;
4. Hiki ke komo i waho i nā pulupulu maʻalahi ke hoʻonui i ke ola kaʻa;
5. High hoʻomaka torque;
6.Dynamic braking e oki wikiwiki;
7. Hiki ke hoohuli;
8.Simple elua-uwea pili;
9.Class F insulation, kiʻekiʻe wela welding commutator.
10. Me ka haʻahaʻa haʻahaʻa a me ka hana paʻa, kūpono loa ia no nā manawa e koi ai i ka wikiwiki kiʻekiʻe a me ka haʻahaʻa haʻahaʻa.
Nā noi
Hoʻohana nui ʻia ia ma nā kula o ka home akamai, nā mea lapaʻau pololei, kaʻa kaʻa, nā huahana uila mea kūʻai aku, ka lomilomi a me nā lako mālama olakino, nā mea mālama pilikino, ka lawe robot naʻauao, ʻenehana ʻoihana, nā mea hana mīkini, nā huahana kikohoʻe, etc.
Kiʻi hoʻokō



He aha nā hiʻohiʻona o DC servo motor
I loko o kahi kaʻa servo DC aia kahi manawa pololei (DC) me nā hopena maikaʻi a maikaʻi ʻole.Ma waena o kēlā me kēia mau pauku, kahe ka au i ka ʻaoʻao like.Pono e liʻiliʻi ka inertia o ka mīkini servo no ka pololei a me ka pololei.Loaʻa i nā servos DC ka pane wikiwiki, i loaʻa ma ka mālama ʻana i kahi kiʻekiʻe torque-to-weight ratio.Eia kekahi, ʻo ka hiʻohiʻona wikiwiki o ka DC servo pono e laina.
Me kahi kaʻa servo DC, ʻoi aku ka maʻalahi o ka mana o kēia manawa ma mua o kahi kaʻa AC servo no ka mea ʻo ka mana wale nō ka mana o ka armature magnitude o kēia manawa.Hoʻomalu ʻia ka wikiwiki o ka kaʻa e ka hoʻololi ʻana i ka pulse width modulation (PWM).Hoʻohana ʻia ka control flux e hoʻokele i ka torque, e hopena i ka kūpaʻa hilinaʻi i kēlā me kēia pōʻai o ka hana.
Loaʻa ka inertia ʻoi aku ka nui o nā motika servo DC ma mua o nā motika AC squirrel-cage.ʻO kēia a me ka hoʻonui ʻana i ka pale frictional brush ke kumu nui e pale ai i kā lākou hoʻohana ʻana i nā servos mea kani.Ma nā liʻiliʻi liʻiliʻi, hoʻohana nui ʻia nā motika servo DC i nā ʻōnaehana hoʻokele mokulele kahi i koi ʻia ai ke kaumaha a me ka hakahaka i ka mīkini e hāʻawi i ka mana kiʻekiʻe no kēlā me kēia leo.Hoʻohana pinepine ʻia lākou no ka hana intermittent a i ʻole kahi e koi ʻia ai ka torque hoʻomaka kiʻekiʻe.Hiki ke hoʻohana ʻia nā motika servo DC i nā mea hana electromechanical, nā mea hoʻoponopono kaʻina hana, nā lako polokalamu, nā robots automation ʻoihana, nā mea hana mīkini CNC, a me nā noi ʻē aʻe he ʻano like.
ʻO ka motika servo DC kahi hui i loaʻa i nā ʻāpana nui ʻehā, ʻo ia hoʻi ka motika DC, kahi mea ʻike kūlana, kahi hui hui, a me kahi kaapuni mana.ʻO ka wikiwiki e pono ai o kahi motika DC e pili ana i ka volta i hoʻohana ʻia.No ka mālama ʻana i ka māmā holo kaʻa, hoʻopuka ka potentiometer i kahi volta i hoʻopili ʻia i kekahi o nā mea hoʻokomo o ka mea hoʻonui hewa.







