Pono Servo DC Motor 46S/12V-8C1

ʻO nā hiʻohiʻona kumu o ka servo DC motor: (nā hiʻohiʻona ʻē aʻe, hiki ke hana maʻamau)
| 1. Hoʻohālikelike ʻia ka uila: | DC 12V | 5. Ua helu ʻia ka wikiwiki: | ≥ 2600 rpm |
| 2. ʻO ka pae uila uila: | DC 7.4V-13V | 6. Ke ālai nei i kēia manawa: | ≤2.5A |
| 3. Ka mana helu: | 25W | 7. Hoʻouka i kēia manawa: | ≥1A |
| 4. Rotation kuhikuhi: | Aia ma luna ka pahu puka CW | 8. Hoʻokuʻu ʻia ka lāʻau: | ≤1.0mm |
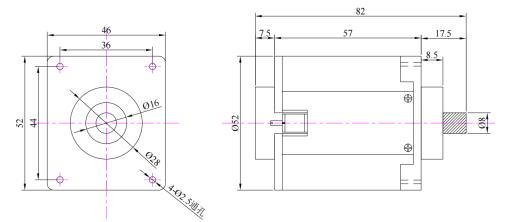
Kiʻikuhi hiʻohiʻona huahana
Pau-manawa
Mai ka lā o ka hana ʻana, ʻo ka manawa hoʻohana palekana he 10 mau makahiki, hoʻomau ka manawa hana ≥2000 mau hola.
Nā hiʻohiʻona huahana
1. Hoʻolālā paʻakikī a mālama i ka lewa;
2. Ke ano o ka poepoe;
3, palaki lōʻihi lawelawe ola;
4, ʻo ke komo ʻana o waho o ka pulupulu hiki ke hoʻonui i ke ola o ka kaʻa;
5. Kiʻekiʻe hoʻomaka torque;
6, hiki ke hoʻokō i ka braking dynamic e hooki wikiwiki;
7. Hiki ke hoohuli;
8. Hoʻohui maʻalahi ʻelua-uwea;
9, F papa insulation, me ka hoʻohana kiʻekiʻe wela welding commutator.
Nā noi
Hoʻohana nui ʻia ia i ka home akamai, nā mea lapaʻau pololei, nā kaʻa kaʻa kaʻa, nā huahana uila mea kūʻai aku, nā lako olakino massage, nā pono mālama pilikino, ka lawe ʻana i ka robot naʻauao, ka ʻenehana ʻoihana, nā lako mīkini ʻokiʻoki, nā huahana kikohoʻe a me nā kula ʻē aʻe.
Ke kumu hana o ka servo motor
I ka lōʻihi o ka hilinaʻi ʻana o ka servo i ka pulse i ke kūlana, hiki ke hoʻomaopopo ʻia ma kēia ʻano, loaʻa i ka servo motor kahi pulse, e hoʻohuli ʻo ia i ka Angle pili o kahi pulse, i hiki ai ke hoʻoneʻe. Ma muli o ka hana o ka mīkini servo ponoʻī i ka hoʻouna ʻana i nā pulses, e hoʻouna ʻia ka helu like o nā pulses no kēlā me kēia Angle rotation o ka motor servo. Ma kēia ʻano, hoʻokani ʻia ka pulse i loaʻa e ka motor servo, a i ʻole i kapa ʻia he loop loop. Ma kēia ala, e ʻike ka ʻōnaehana i ka nui o nā pulses i hoʻouna ʻia i ka mīkini servo, a me ka nui o nā pulses i loaʻa hou, i hiki ke hoʻokele pololei loa i ka rotation kaʻa, i hiki ai ke hoʻokō pololei i ke kūlana, hiki ke hiki i 0.001mm .
Kiʻi hoʻokō










